Variational Inference#
Goals:#
G1: Given probability distributions \(p\) and \(q\), find the divergence (measure of similarity) between them#
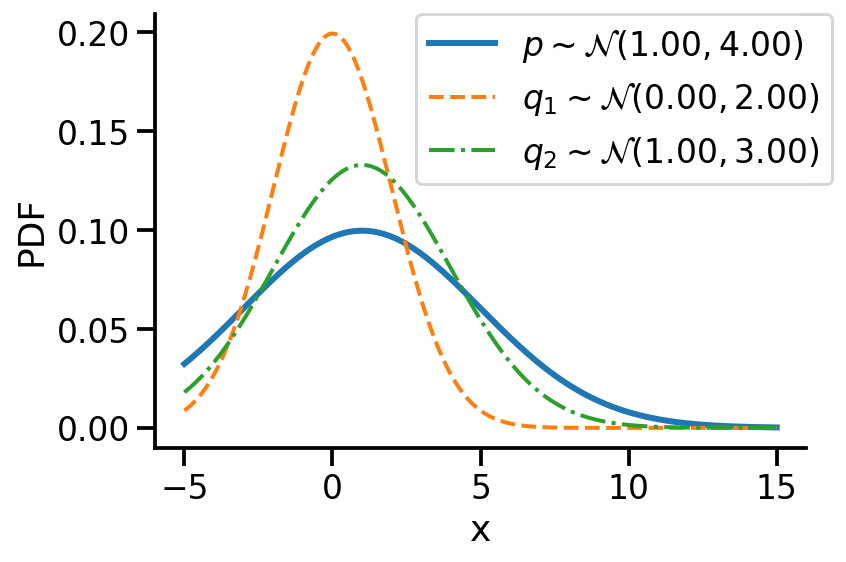
Let us first look at G1. Look at the illustration below. We have a normal distribution \(p\) and two other normal distributions \(q_1\) and \(q_2\). Which of \(q_1\) and \(q_2\), would we consider closer to \(p\)? \(q_2\), right?

To understand the notion of similarity, we use a metric called the KL-divergence given as \(D_{KL}(a || b)\) where \(a\) and \(b\) are the two distributions.
For G1, we can say \(q_2\) is closer to \(p\) compared to \(q_1\) as:
\(D_{KL}(q_2 || p) \lt D_{KL}(q_1 || p)\)
For the above example, we have the values as \(D_{KL}(q_2|| p) = 0.07\) and \(D_{KL}(q_1|| p)= 0.35\)
G2: assuming \(p\) to be fixed, can we find optimum parameters of \(q\) to make it as close as possible to \(p\)#
The following GIF shows the process of finding the optimum set of parameters for a normal distribution \(q\) so that it becomes as close as possible to \(p\). This is equivalent of minimizing \(D_{KL}(q || p)\)

The following GIF shows the above but for a two-dimensional distribution.

G3: finding the “distance” between two distributions of different families#
The below image shows the KL-divergence between distribution 1 (mixture of Gaussians) and distribution 2 (Gaussian)

G4: optimizing the “distance” between two distributions of different families#
The below GIF shows the optimization of the KL-divergence between distribution 1 (mixture of Gaussians) and distribution 2 (Gaussian)

G5: Approximating the KL-divergence#
G6: Implementing variational inference for linear regression#
Basic Imports#
import numpy as np
import matplotlib.pyplot as plt
import torch
import seaborn as sns
import pandas as pd
dist =torch.distributions
sns.reset_defaults()
sns.set_context(context="talk", font_scale=1)
%matplotlib inline
%config InlineBackend.figure_format='retina'
Creating distributions#
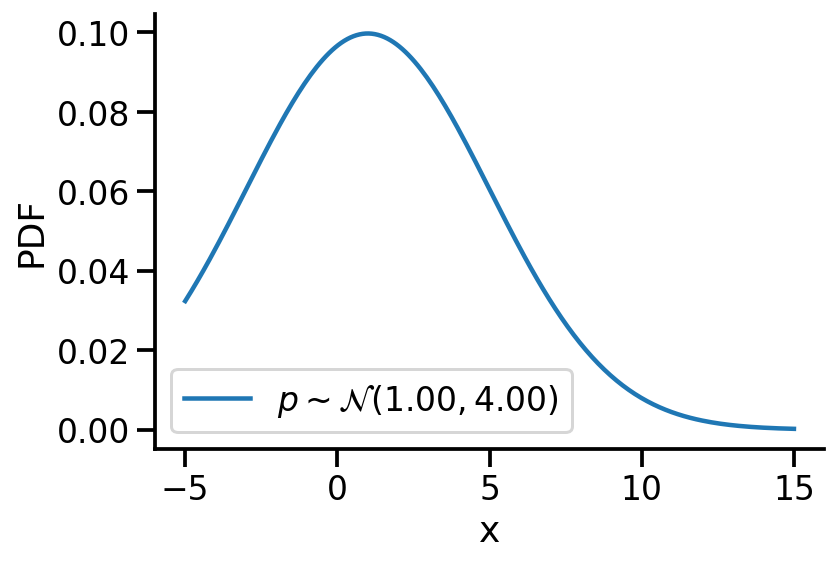
Creating \(p\sim\mathcal{N}(1.00, 4.00)\)#
p = dist.Normal(1, 4)
z_values = torch.linspace(-5, 15, 200)
prob_values_p = torch.exp(p.log_prob(z_values))
plt.plot(z_values, prob_values_p, label=r"$p\sim\mathcal{N}(1.00, 4.00)$")
sns.despine()
plt.legend()
plt.xlabel("x")
plt.ylabel("PDF")
Text(0, 0.5, 'PDF')
Creating \(q\sim\mathcal{N}(loc, scale)\)#
def create_q(loc, scale):
return dist.Normal(loc, scale)
Generating a few qs for different location and scale value#
q = {}
q[(0, 1)] = create_q(0.0, 1.0)
for loc in [0, 1]:
for scale in [1, 2]:
q[(loc, scale)] = create_q(float(loc), float(scale))
plt.plot(z_values, prob_values_p, label=r"$p\sim\mathcal{N}(1.00, 4.00)$", lw=3)
plt.plot(
z_values,
torch.exp(create_q(0.0, 2.0).log_prob(z_values)),
label=r"$q_1\sim\mathcal{N}(0.00, 2.00)$",
lw=2,
linestyle="--",
)
plt.plot(
z_values,
torch.exp(create_q(1.0, 3.0).log_prob(z_values)),
label=r"$q_2\sim\mathcal{N}(1.00, 3.00)$",
lw=2,
linestyle="-.",
)
plt.legend(bbox_to_anchor=(1.04, 1), borderaxespad=0)
plt.xlabel("x")
plt.ylabel("PDF")
sns.despine()
plt.tight_layout()
plt.savefig(
"dkl.png",
dpi=150,
)
#### Computing KL-divergence
q_0_2_dkl = dist.kl_divergence(create_q(0.0, 2.0), p)
q_1_3_dkl = dist.kl_divergence(create_q(1.0, 3.0), p)
print(f"D_KL (q(0, 2)||p) = {q_0_2_dkl:0.2f}")
print(f"D_KL (q(1, 3)||p) = {q_1_3_dkl:0.2f}")
D_KL (q(0, 2)||p) = 0.35
D_KL (q(1, 3)||p) = 0.07
As mentioned earlier, clearly, \(q_2\sim\mathcal{N}(1.00, 3.00)\) seems closer to \(p\)
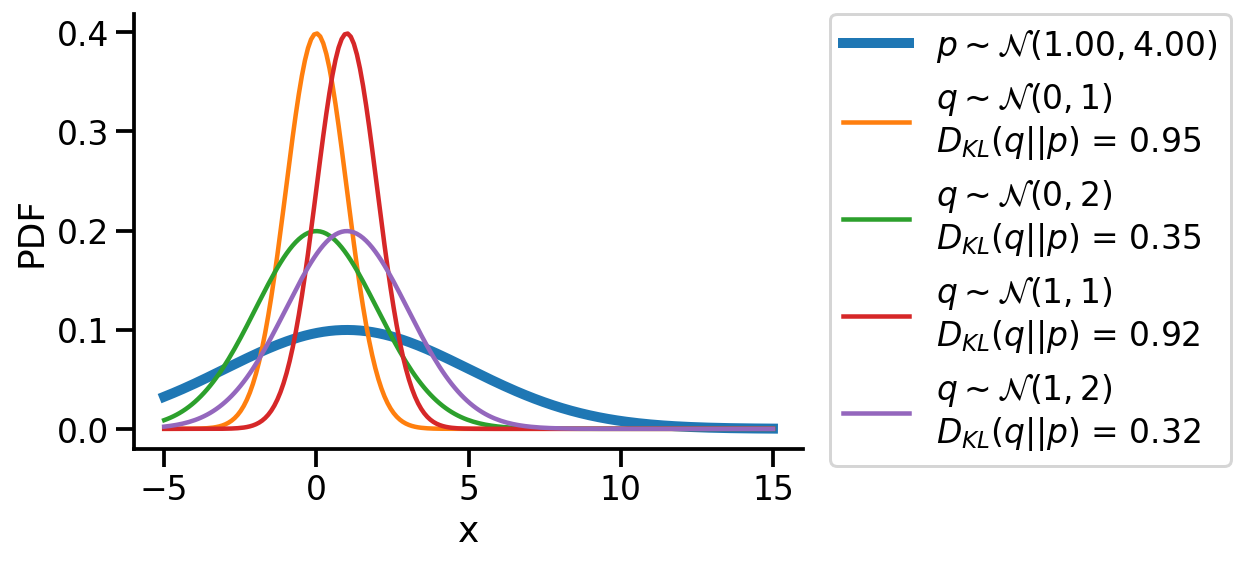
Optimizing the KL-divergence between q and p#
We could create a grid of (loc, scale) pairs and find the best, as shown below.
plt.plot(z_values, prob_values_p, label=r"$p\sim\mathcal{N}(1.00, 4.00)$", lw=5)
for loc in [0, 1]:
for scale in [1, 2]:
q_d = q[(loc, scale)]
kl_d = dist.kl_divergence(q[(loc, scale)], p)
plt.plot(
z_values,
torch.exp(q_d.log_prob(z_values)),
label=rf"$q\sim\mathcal{{N}}({loc}, {scale})$"
+ "\n"
+ rf"$D_{{KL}}(q||p)$ = {kl_d:0.2f}",
)
plt.legend(bbox_to_anchor=(1.04, 1), borderaxespad=0)
plt.xlabel("x")
plt.ylabel("PDF")
sns.despine()
Or, we could use continuous optimization to find the best loc and scale parameters for q.
loc = torch.tensor(8.0, requires_grad=True)
scale = torch.tensor(0.1, requires_grad=True)
loc_array = []
scale_array = []
loss_array = []
opt = torch.optim.Adam([loc, scale], lr=0.05)
for i in range(401):
scale_softplus = torch.functional.F.softplus(scale)
to_learn = dist.Normal(loc=loc, scale=scale_softplus)
loss = dist.kl_divergence(to_learn, p)
loss_array.append(loss.item())
loc_array.append(to_learn.loc.item())
scale_array.append(to_learn.scale.item())
loss.backward()
if i % 100 == 0:
print(
f"Iteration: {i}, Loss: {loss.item():0.2f}, Loc: {loc.item():0.2f}, Scale: {scale_softplus.item():0.2f}"
)
opt.step()
opt.zero_grad()
Iteration: 0, Loss: 2.73, Loc: 8.00, Scale: 0.74
Iteration: 100, Loss: 0.26, Loc: 3.75, Scale: 3.46
Iteration: 200, Loss: 0.01, Loc: 1.68, Scale: 3.98
Iteration: 300, Loss: 0.00, Loc: 1.10, Scale: 4.00
Iteration: 400, Loss: 0.00, Loc: 1.01, Scale: 4.00
plt.plot(torch.tensor(scale_array))
plt.plot(torch.tensor(loc_array))
plt.plot(torch.tensor(loss_array))
[<matplotlib.lines.Line2D at 0x13d709d30>]
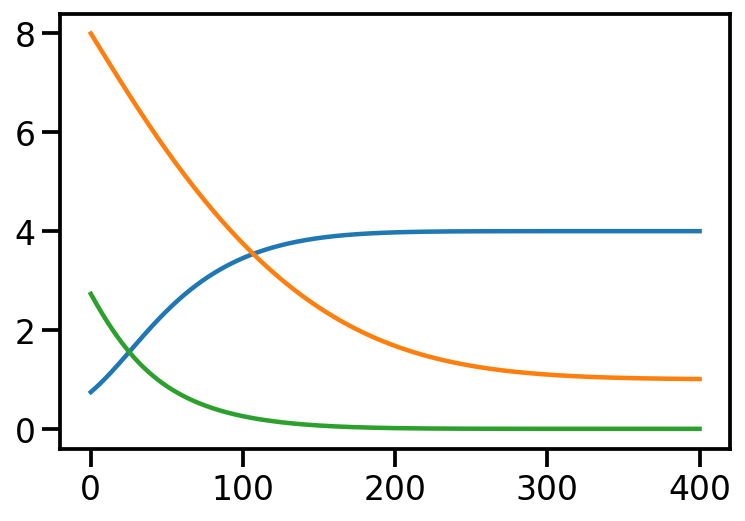
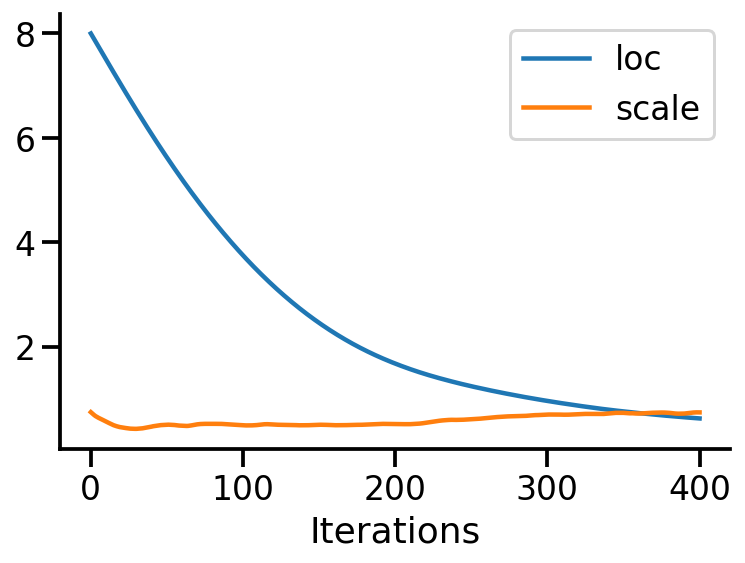
After training, we are able to recover the scale and loc very close to that of \(p\)
Animation!#
from matplotlib import animation
fig = plt.figure(tight_layout=True, figsize=(8, 4))
ax = fig.gca()
def animate(i):
ax.clear()
ax.plot(z_values, prob_values_p, label=r"$p\sim\mathcal{N}(1.00, 4.00)$", lw=5)
to_learn_q = dist.Normal(loc = loc_array[i], scale=scale_array[i])
loss = loss_array[i]
ax.plot(
z_values,
torch.exp(to_learn_q.log_prob(z_values)),
label=rf"$q\sim \mathcal{{N}}({loc:0.2f}, {scale:0.2f})$",
)
ax.set_title(rf"Iteration: {i}, $D_{{KL}}(q||p)$: {loss:0.2f}")
ax.legend(bbox_to_anchor=(1.1, 1), borderaxespad=0)
ax.set_ylim((0, 1))
ax.set_xlim((-5, 15))
ax.set_xlabel("x")
ax.set_ylabel("PDF")
sns.despine()
ani = animation.FuncAnimation(fig, animate, frames=350)
plt.close()
ani.save("kl_qp.gif", writer="imagemagick", fps=60)
<Figure size 432x288 with 0 Axes>
Finding the KL divergence for two distributions from different families#
Let us rework our example with p coming from a mixture of Gaussian distribution and q being Normal.
p_s = dist.MixtureSameFamily(
mixture_distribution=dist.Categorical(probs=torch.tensor([0.5, 0.5])),
component_distribution=dist.Normal(
loc=torch.tensor([-0.2, 1]), scale=torch.tensor([0.4, 0.5]) # One for each component.
),
)
p_s
MixtureSameFamily(
Categorical(probs: torch.Size([2]), logits: torch.Size([2])),
Normal(loc: torch.Size([2]), scale: torch.Size([2])))
plt.plot(z_values, torch.exp(p_s.log_prob(z_values)))
sns.despine()
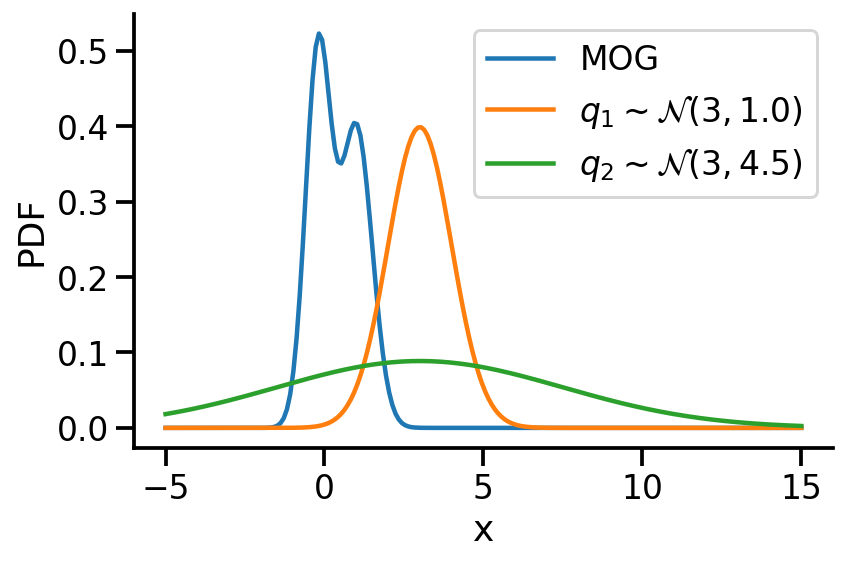
Let us create two Normal distributions q_1 and q_2 and plot them to see which looks closer to p_s.
q_1 = create_q(3, 1)
q_2 = create_q(3, 4.5)
prob_values_p_s = torch.exp(p_s.log_prob(z_values))
prob_values_q_1 = torch.exp(q_1.log_prob(z_values))
prob_values_q_2 = torch.exp(q_2.log_prob(z_values))
plt.plot(z_values, prob_values_p_s, label=r"MOG")
plt.plot(z_values, prob_values_q_1, label=r"$q_1\sim\mathcal{N} (3, 1.0)$")
plt.plot(z_values, prob_values_q_2, label=r"$q_2\sim\mathcal{N} (3, 4.5)$")
sns.despine()
plt.legend()
plt.xlabel("x")
plt.ylabel("PDF")
plt.tight_layout()
plt.savefig(
"dkl-different.png",
dpi=150,
)
try:
dist.kl_divergence(q_1, p_s)
except NotImplementedError:
print(f"KL divergence not implemented between {q_1.__class__} and {p_s.__class__}")
KL divergence not implemented between <class 'torch.distributions.normal.Normal'> and <class 'torch.distributions.mixture_same_family.MixtureSameFamily'>
As we see above, we can not compute the KL divergence directly. The core idea would now be to leverage the Monte Carlo sampling and generating the expectation. The following function does that.
def kl_via_sampling(q, p, n_samples=100000):
# Get samples from q
sample_set = q.sample([n_samples])
# Use the definition of KL-divergence
return torch.mean(q.log_prob(sample_set) - p.log_prob(sample_set))
dist.kl_divergence(q_1, q_2)
tensor(1.0288)
kl_via_sampling(q_1, q_2)
tensor(1.0268)
kl_via_sampling(q_1, p_s), kl_via_sampling(q_2, p_s)
(tensor(9.4963), tensor(45.4601))
As we can see from KL divergence calculations, q_1 is closer to our Gaussian mixture distribution.
Optimizing the KL divergence for two distributions from different families#
We saw that we can calculate the KL divergence between two different distribution families via sampling. But, as we did earlier, will we be able to optimize the parameters of our target surrogate distribution? The answer is No! As we have introduced sampling. However, there is still a way – by reparameterization!
Our surrogate q in this case is parameterized by loc and scale. The key idea here is to generate samples from a standard normal distribution (loc=0, scale=1) and then apply an affine transformation on the generated samples to get the samples generated from q. See my other post on sampling from normal distribution to understand this better.
The loss can now be thought of as a function of loc and scale.
n_samples = 1000
def loss(loc, scale):
q = dist.Normal(loc=loc, scale=scale)
std_normal = dist.Normal(loc=0.0, scale=1.0)
sample_set = std_normal.sample([n_samples])
sample_set = loc + scale * sample_set
return torch.mean(q.log_prob(sample_set) - p_s.log_prob(sample_set))
Having defined the loss above, we can now optimize loc and scale to minimize the KL-divergence.
optimizer = tf.optimizers.Adam(learning_rate=0.05)
loc = torch.tensor(8.0, requires_grad=True)
scale = torch.tensor(0.1, requires_grad=True)
loc_array = []
scale_array = []
loss_array = []
opt = torch.optim.Adam([loc, scale], lr=0.05)
for i in range(401):
scale_softplus = torch.functional.F.softplus(scale)
to_learn = dist.Normal(loc=loc, scale=scale_softplus)
loss_value = loss(loc, scale_softplus)
loss_array.append(loss_value.item())
loc_array.append(to_learn.loc.item())
scale_array.append(to_learn.scale.item())
loss_value.backward()
if i % 100 == 0:
print(
f"Iteration: {i}, Loss: {loss_value.item():0.2f}, Loc: {loc.item():0.2f}, Scale: {scale_softplus.item():0.2f}"
)
opt.step()
opt.zero_grad()
Iteration: 0, Loss: 99.76, Loc: 8.00, Scale: 0.74
Iteration: 100, Loss: 15.53, Loc: 3.75, Scale: 0.49
Iteration: 200, Loss: 1.57, Loc: 1.67, Scale: 0.51
Iteration: 300, Loss: 0.33, Loc: 0.96, Scale: 0.70
Iteration: 400, Loss: 0.08, Loc: 0.62, Scale: 0.74
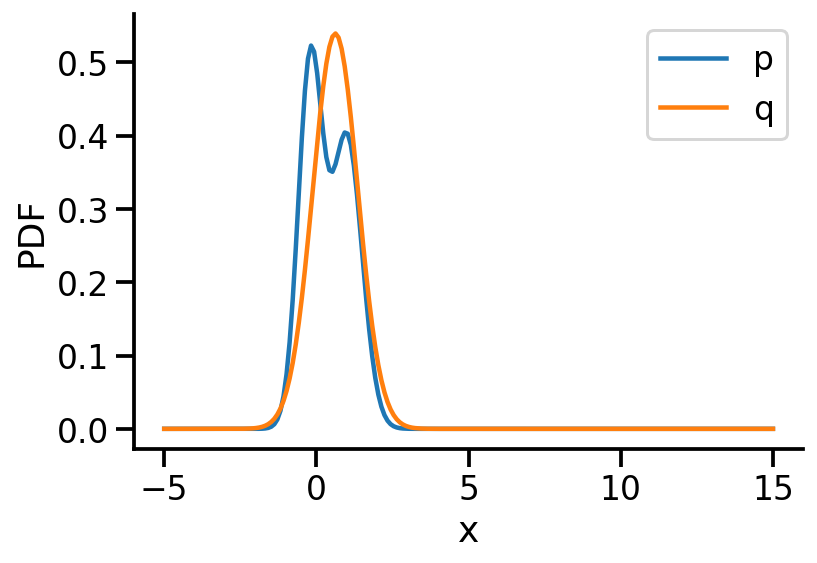
q_s = dist.Normal(loc=loc, scale=scale_softplus)
q_s
Normal(loc: 0.6216101050376892, scale: 0.739622175693512)
prob_values_p_s = torch.exp(p_s.log_prob(z_values))
prob_values_q_s = torch.exp(q_s.log_prob(z_values))
plt.plot(z_values, prob_values_p_s.detach(), label=r"p")
plt.plot(z_values, prob_values_q_s.detach(), label=r"q")
sns.despine()
plt.legend()
plt.xlabel("x")
plt.ylabel("PDF")
Text(0, 0.5, 'PDF')
prob_values_p_s = torch.exp(p_s.log_prob(z_values))
fig = plt.figure(tight_layout=True, figsize=(8, 4))
ax = fig.gca()
n_iter = 300
def a(iteration):
ax.clear()
loc = loc_array[iteration]
scale = scale_array[iteration]
q_s = dist.Normal(loc=loc, scale=scale)
prob_values_q_s = torch.exp(q_s.log_prob(z_values))
ax.plot(z_values, prob_values_p_s, label=r"p")
ax.plot(z_values, prob_values_q_s, label=r"q")
ax.set_title(f"Iteration {iteration}, Loss: {loss_array[iteration]:0.2f}")
ax.set_ylim((-0.05, 1.05))
ax.legend()
ani_mg = animation.FuncAnimation(fig, a, frames=n_iter)
plt.close()
plt.plot(loc_array, label="loc")
plt.plot(scale_array, label="scale")
plt.xlabel("Iterations")
sns.despine()
plt.legend()
<matplotlib.legend.Legend at 0x140988be0>
ani_mg.save("kl_qp_mg.gif", writer="imagemagick")
KL-Divergence and ELBO#
Let us consider linear regression. We have parameters \(\theta \in R^D\) and we define a prior over them. Let us assume we define prior \(p(\theta)\sim \mathcal{N_D} (\mu, \Sigma)\). Now, given our dataset \(D = \{X, y\}\) and a parameter vector \(\theta\), we can deifine our likelihood as \(p(D|\theta)\) or \(p(y|X, \theta) = \prod_{i=1}^{n} p(y_i|x_i, \theta) = \prod_{i=1}^{n} \mathcal{N}(y_i|x_i^T\theta, \sigma^2) \)
As per Bayes rule, we can obtain the posterior over \(\theta\) as:
\(p(\theta|D) = \dfrac{p(D|\theta)p(\theta)}{p(D)}\)
Now, in general \(p(D)\) is hard to compute.
So, in variational inference, our aim is to use a surrogate distribution \(q(\theta)\) such that it is very close to \(p(\theta|D)\). We do so by minimizing the KL divergence between \(q(\theta)\) and \(p(\theta|D)\).
Aim: $\(q^*(\theta) = \underset{q(\theta) \in \mathcal{Q}}{\mathrm{argmin~}} D_{KL}[q(\theta)||p(\theta|D)]\)$
Now, $\(D_{KL}[q(\theta)||p(\theta|D)] = \mathbb{E}_{q(\theta)}[\log\frac{q(\theta)}{p(\theta|D)}]\)\( Now, \)\( = \mathbb{E}_{q(\theta)}[\log\frac{q(\theta)p(D)}{p(\theta, D)}]\)\( Now, \)\( = \mathbb{E}_{q(\theta)}[\log q(\theta)]- \mathbb{E}_{q(\theta)}[\log p(\theta, D)] + \mathbb{E}_{q(\theta)}[\log p(D)] \)\( \)\(= \mathbb{E}_{q(\theta)}[\log q(\theta)]- \mathbb{E}_{q(\theta)}[\log p(\theta, D)] + \log p(D) \)$
Now, \(p(D) \in \{0, 1\}\). Thus, \(\log p(D) \in \{-\infty, 0 \}\)
Now, let us look at the quantities:
Thus, we know that \(\log p(D) \geq \text{ELBO(q)}\)
Thus, finally we can rewrite the optimisation from
to
Now, given our linear regression problem setup, we want to maximize the ELBO.
We can do so by the following. As a simple example, let us assume \(\theta \in R^2\)
Assume some q. Say, a Normal distribution. So, \(q\sim \mathcal{N}_2\)
Draw samples from q. Say N samples.
Initilize ELBO = 0.0
For each sample:
Let us assume drawn sample is \([\theta_1, \theta_2]^T\)
Compute log_prob of prior on \([\theta_1, \theta_2]^T\) or
lp = p.log_prob(θ1, θ2)Compute log_prob of likelihood on \([\theta_1, \theta_2]^T\) or
ll = l.log_prob(θ1, θ2)Compute log_prob of q on \([\theta_1, \theta_2]^T\) or
lq = q.log_prob(θ1, θ2)ELBO = ELBO + (ll+lp-q)
Return ELBO/N
prior = dist.Normal(loc = 0., scale = 1.)
p = dist.Normal(loc = 5., scale = 1.)
samples = p.sample([1000])
mu = torch.tensor(1.0, requires_grad=True)
def surrogate_sample(mu):
std_normal = dist.Normal(loc = 0., scale=1.)
sample_std_normal = std_normal.sample()
return mu + sample_std_normal
samples_from_surrogate = surrogate_sample(mu)
samples_from_surrogate
tensor(2.7988, grad_fn=<AddBackward0>)
def logprob_prior(mu):
return prior.log_prob(mu)
lp = logprob_prior(samples_from_surrogate)
def log_likelihood(mu, samples):
di = dist.Normal(loc=mu, scale=1)
return torch.sum(di.log_prob(samples))
ll = log_likelihood(samples_from_surrogate, samples)
ls = surrogate.log_prob(samples_from_surrogate)
def elbo_loss(mu, data_samples):
samples_from_surrogate = surrogate_sample(mu)
lp = logprob_prior(samples_from_surrogate)
ll = log_likelihood(samples_from_surrogate, data_samples)
ls = surrogate.log_prob(samples_from_surrogate)
return -lp - ll + ls
mu = torch.tensor(1.0, requires_grad=True)
loc_array = []
loss_array = []
opt = torch.optim.Adam([mu], lr=0.02)
for i in range(2000):
loss_val = elbo_loss(mu, samples)
loss_val.backward()
loc_array.append(mu.item())
loss_array.append(loss_val.item())
if i % 100 == 0:
print(
f"Iteration: {i}, Loss: {loss_val.item():0.2f}, Loc: {mu.item():0.3f}"
)
opt.step()
opt.zero_grad()
Iteration: 0, Loss: 11693.85, Loc: 1.000
Iteration: 100, Loss: 2550.90, Loc: 2.744
Iteration: 200, Loss: 2124.30, Loc: 3.871
Iteration: 300, Loss: 2272.48, Loc: 4.582
Iteration: 400, Loss: 2025.17, Loc: 4.829
Iteration: 500, Loss: 1434.45, Loc: 5.079
Iteration: 600, Loss: 1693.33, Loc: 5.007
Iteration: 700, Loss: 1495.89, Loc: 4.957
Iteration: 800, Loss: 2698.28, Loc: 5.149
Iteration: 900, Loss: 2819.85, Loc: 5.117
Iteration: 1000, Loss: 1491.79, Loc: 5.112
Iteration: 1100, Loss: 1767.87, Loc: 4.958
Iteration: 1200, Loss: 1535.30, Loc: 4.988
Iteration: 1300, Loss: 1458.61, Loc: 4.949
Iteration: 1400, Loss: 1400.21, Loc: 4.917
Iteration: 1500, Loss: 2613.42, Loc: 5.073
Iteration: 1600, Loss: 1411.46, Loc: 4.901
Iteration: 1700, Loss: 1587.94, Loc: 5.203
Iteration: 1800, Loss: 1461.40, Loc: 5.011
Iteration: 1900, Loss: 1504.93, Loc: 5.076
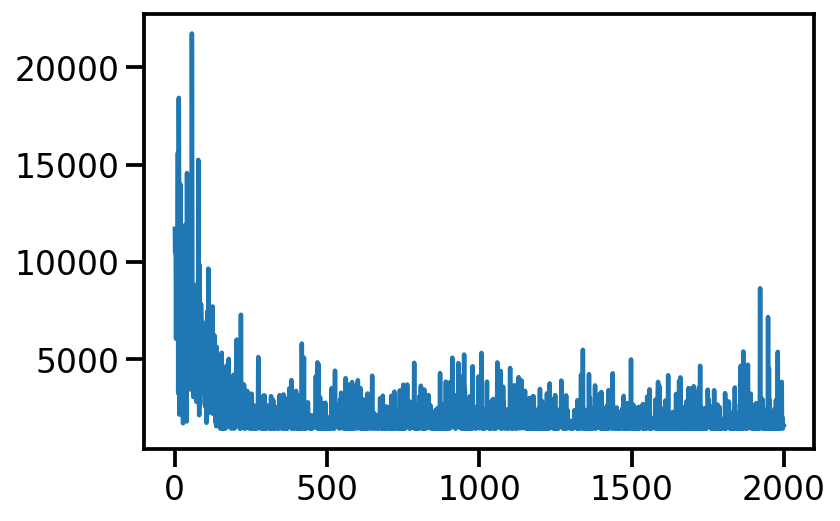
plt.plot(loss_array)
[<matplotlib.lines.Line2D at 0x14069f5e0>]
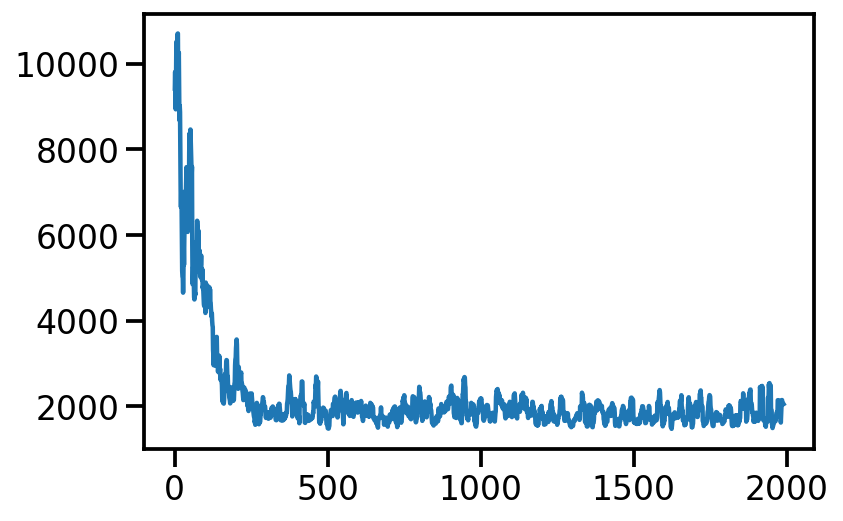
from numpy.lib.stride_tricks import sliding_window_view
plt.plot(np.average(sliding_window_view(loss_array, window_shape = 10), axis=1))
[<matplotlib.lines.Line2D at 0x14062c250>]
Linear Regression#
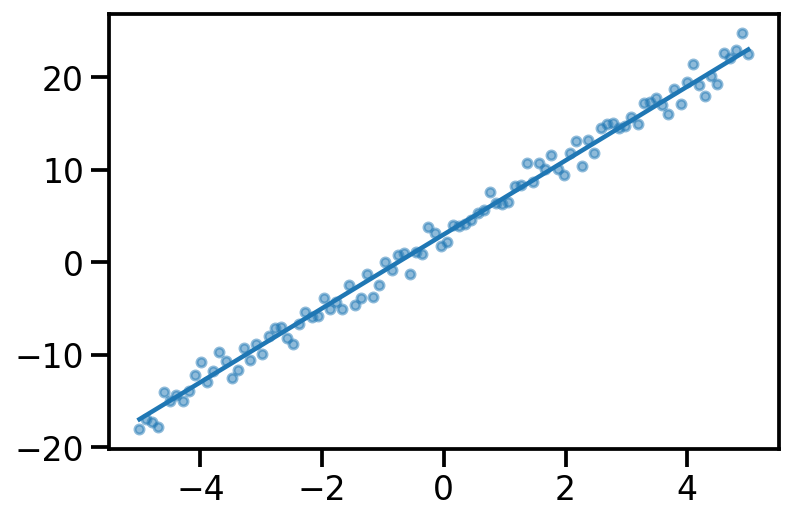
true_theta_0 = 3.
true_theta_1 = 4.
x = torch.linspace(-5, 5, 100)
y_true = true_theta_0 + true_theta_1*x
y_noisy = y_true + torch.normal(mean = torch.zeros_like(x), std = torch.ones_like(x))
plt.plot(x, y_true)
plt.scatter(x, y_noisy, s=20, alpha=0.5)
<matplotlib.collections.PathCollection at 0x1407aaac0>
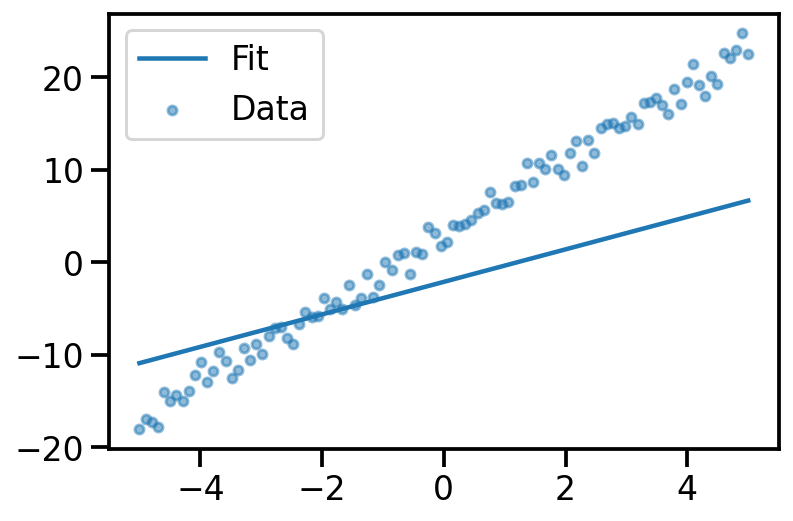
y_pred = x_dash@theta_prior.sample()
plt.plot(x, y_pred, label="Fit")
plt.scatter(x, y_noisy, s=20, alpha=0.5, label='Data')
plt.legend()
<matplotlib.legend.Legend at 0x14064e850>
theta_prior = dist.MultivariateNormal(loc = torch.tensor([0., 0.]), covariance_matrix=torch.eye(2))
def likelihood(theta, x, y):
x_dash = torch.vstack((torch.ones_like(x), x)).t()
d = dist.Normal(loc=x_dash@theta, scale=torch.ones_like(x))
return torch.sum(d.log_prob(y))
likelihood(theta_prior.sample(), x, y_noisy)
tensor(-3558.0769)
loc = torch.tensor([-1., 1.], requires_grad=True)
surrogate_mvn = dist.MultivariateNormal(loc = loc, covariance_matrix=torch.eye(2))
surrogate_mvn
MultivariateNormal(loc: torch.Size([2]), covariance_matrix: torch.Size([2, 2]))
surrogate_mvn.sample()
tensor([-1.1585, 2.6212])
def surrogate_sample_mvn(loc):
std_normal_mvn = dist.MultivariateNormal(loc = torch.zeros_like(loc), covariance_matrix=torch.eye(loc.shape[0]))
sample_std_normal = std_normal_mvn.sample()
return loc + sample_std_normal
def elbo_loss(loc, x, y):
samples_from_surrogate_mvn = surrogate_sample_mvn(loc)
lp = theta_prior.log_prob(samples_from_surrogate_mvn)
ll = likelihood(samples_from_surrogate_mvn, x, y_noisy)
ls = surrogate_mvn.log_prob(samples_from_surrogate_mvn)
return -lp - ll + ls
loc.shape, x.shape, y_noisy.shape
(torch.Size([2]), torch.Size([100]), torch.Size([100]))
elbo_loss(loc, x, y_noisy)
tensor(2850.3154, grad_fn=<AddBackward0>)
loc = torch.tensor([-1., 1.], requires_grad=True)
loc_array = []
loss_array = []
opt = torch.optim.Adam([loc], lr=0.02)
for i in range(10000):
loss_val = elbo_loss(loc, x, y_noisy)
loss_val.backward()
loc_array.append(mu.item())
loss_array.append(loss_val.item())
if i % 1000 == 0:
print(
f"Iteration: {i}, Loss: {loss_val.item():0.2f}, Loc: {loc}"
)
opt.step()
opt.zero_grad()
Iteration: 0, Loss: 5479.97, Loc: tensor([-1., 1.], requires_grad=True)
Iteration: 1000, Loss: 566.63, Loc: tensor([2.9970, 4.0573], requires_grad=True)
Iteration: 2000, Loss: 362.19, Loc: tensor([2.9283, 3.9778], requires_grad=True)
Iteration: 3000, Loss: 231.23, Loc: tensor([2.8845, 4.1480], requires_grad=True)
Iteration: 4000, Loss: 277.94, Loc: tensor([2.9284, 3.9904], requires_grad=True)
Iteration: 5000, Loss: 1151.51, Loc: tensor([2.9620, 4.0523], requires_grad=True)
Iteration: 6000, Loss: 582.19, Loc: tensor([2.8003, 4.0540], requires_grad=True)
Iteration: 7000, Loss: 178.48, Loc: tensor([2.8916, 3.9968], requires_grad=True)
Iteration: 8000, Loss: 274.76, Loc: tensor([3.0807, 4.1957], requires_grad=True)
Iteration: 9000, Loss: 578.37, Loc: tensor([2.9830, 4.0174], requires_grad=True)
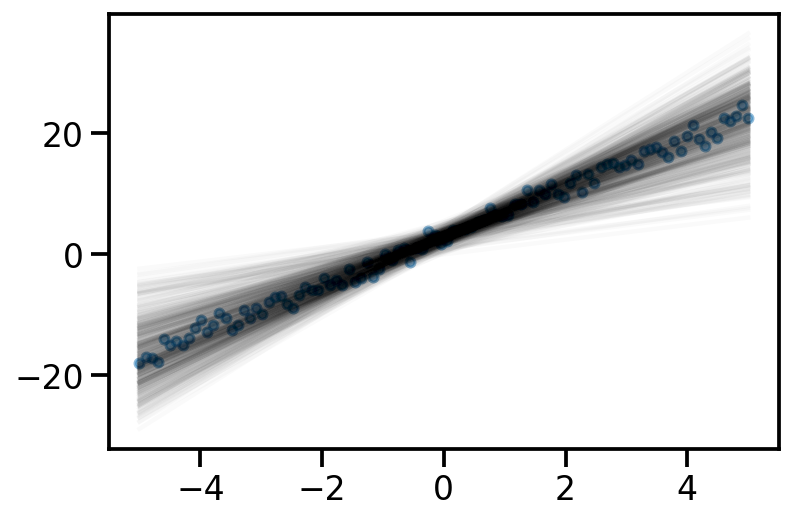
learnt_surrogate = dist.MultivariateNormal(loc = loc, covariance_matrix=torch.eye(2))
y_samples_surrogate = x_dash@learnt_surrogate.sample([500]).t()
plt.plot(x, y_samples_surrogate, alpha = 0.02, color='k');
plt.scatter(x, y_noisy, s=20, alpha=0.5)
<matplotlib.collections.PathCollection at 0x144709a90>
x_dash@learnt_surrogate.loc.detach().t()
theta_sd = torch.linalg.cholesky(learnt_surrogate.covariance_matrix)
#y_samples_surrogate = x_dash@learnt_surrogate.loc.t()
#plt.plot(x, y_samples_surrogate, alpha = 0.02, color='k');
#plt.scatter(x, y_noisy, s=20, alpha=0.5)
tensor([-1.6542e+01, -1.6148e+01, -1.5754e+01, -1.5360e+01, -1.4966e+01,
-1.4572e+01, -1.4178e+01, -1.3784e+01, -1.3390e+01, -1.2996e+01,
-1.2602e+01, -1.2208e+01, -1.1814e+01, -1.1420e+01, -1.1026e+01,
-1.0632e+01, -1.0238e+01, -9.8441e+00, -9.4501e+00, -9.0561e+00,
-8.6621e+00, -8.2681e+00, -7.8741e+00, -7.4801e+00, -7.0860e+00,
-6.6920e+00, -6.2980e+00, -5.9040e+00, -5.5100e+00, -5.1160e+00,
-4.7220e+00, -4.3280e+00, -3.9340e+00, -3.5400e+00, -3.1460e+00,
-2.7520e+00, -2.3579e+00, -1.9639e+00, -1.5699e+00, -1.1759e+00,
-7.8191e-01, -3.8790e-01, 6.1054e-03, 4.0011e-01, 7.9412e-01,
1.1881e+00, 1.5821e+00, 1.9761e+00, 2.3702e+00, 2.7642e+00,
3.1582e+00, 3.5522e+00, 3.9462e+00, 4.3402e+00, 4.7342e+00,
5.1282e+00, 5.5222e+00, 5.9162e+00, 6.3102e+00, 6.7043e+00,
7.0983e+00, 7.4923e+00, 7.8863e+00, 8.2803e+00, 8.6743e+00,
9.0683e+00, 9.4623e+00, 9.8563e+00, 1.0250e+01, 1.0644e+01,
1.1038e+01, 1.1432e+01, 1.1826e+01, 1.2220e+01, 1.2614e+01,
1.3008e+01, 1.3402e+01, 1.3796e+01, 1.4190e+01, 1.4584e+01,
1.4978e+01, 1.5372e+01, 1.5766e+01, 1.6160e+01, 1.6554e+01,
1.6948e+01, 1.7342e+01, 1.7736e+01, 1.8131e+01, 1.8525e+01,
1.8919e+01, 1.9313e+01, 1.9707e+01, 2.0101e+01, 2.0495e+01,
2.0889e+01, 2.1283e+01, 2.1677e+01, 2.2071e+01, 2.2465e+01])
TODO
Pyro for linear regression example
Handle more samples in ELBO
Reuse some methods
Add figure on reparameterization
Linear regression learn covariance also
Linear regression posterior compare with analytical posterior (refer Murphy book)
Clean up code and reuse code whwrever possible
Improve figures and make them consistent
Add background maths wherever needed
plot the Directed graphical model (refer Maths ML book and render in Pyro)
Look at the TFP post on https://www.tensorflow.org/probability/examples/Probabilistic_Layers_Regression
Show the effect of data size (less data, solution towards prior, else dominated by likelihood)
Mean Firld (full covariance v/s diagonal) for surrogate
References