Encoder-Decoder Networks#
Author: Zeel B Patel
Imports#
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '3'
import numpy as np
import torch
from torch import Tensor
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.utils.data import DataLoader, TensorDataset
from beartype import beartype
from jaxtyping import Float, jaxtyped
from sklearn.preprocessing import OneHotEncoder
from tqdm.notebook import tqdm
import matplotlib.pyplot as plt
from typing import Union, Tuple
device = "cuda"
Problem: Next Character Prediction#
Before diving into the specifics, it’d be helpful to define a tiny problem (without loss of generality).
Problm: Given a sequence of characters, predict the next character in the sequence.
Example input: “hell”
Example output: “o”
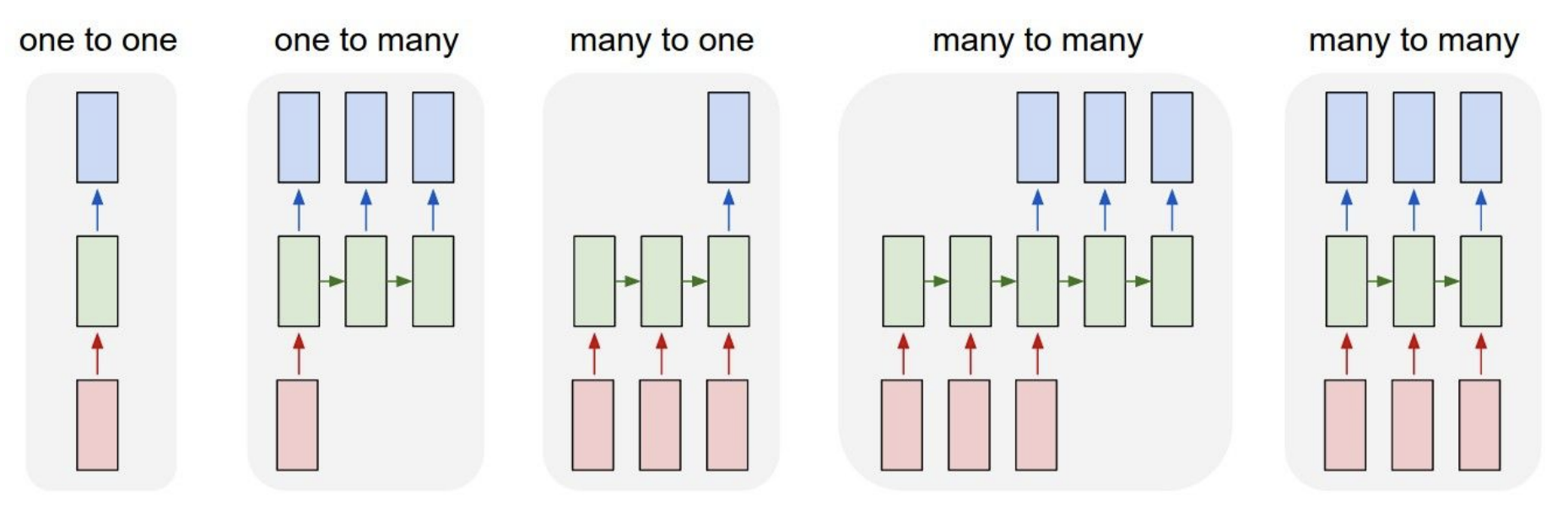
Recurrent Neural Networks (RNNs)#
Resource: Andrej Karpathy | CS231n Winter 2016: Lecture 10: Recurrent Neural Networks, Image Captioning, LSTM
Image source: https://cs231n.github.io/assets/rnn/types.png
Reccurrent Equation#
\(h_t\) is the hidden state at time \(t\).
\(h_{t-1}\) is the hidden state at time \(t-1\).
\(x_t\) is the input at time \(t\).
Question
But, what do we do with these hidden states? We want to predict the next character in the sequence.
Answer
The reccurent equation just represents the “encoder”. We need a “decoder” to predict the next character in the sequence.
Encoder-Decoder#
Encoder (\(f\)): Encodes an input into a hidden state.
Decoder (\(g\)): Decodes the hidden state into an output.
Thought
This looks similar to vanilla neural network with one hidden layer. The hidden layer is encoding the input and the output layer is decoding the hidden state.
Answer
Yes, we can generelize “Encoder-Decoder” terminology to vanilla neural networks as well.
Encoder |
Decoder |
|
|---|---|---|
Vanilla NNs |
\(h = f(x)\) |
\(y = g(h)\) |
RNNs |
\(h_t = f(h_{t-1}, x_t)\) |
\(y_t = g(h_t)\) |
Another way? |
\(h_{t-1} = f(x_{t-1})\) |
\(y_t = g(h_{t-1}, x_t)\) |
Another way is related to Neural processes. Okay, back to the focus of this notebook.
Coding RNNs#
class RNNEncoder(nn.Module):
def __init__(self, feat_dim: int, hidden_dim: int):
super(RNNEncoder, self).__init__()
self.w_x = nn.Parameter(torch.randn(feat_dim, hidden_dim) / np.sqrt(feat_dim * hidden_dim))
self.w_h = nn.Parameter(torch.randn(hidden_dim, hidden_dim) / np.sqrt(hidden_dim * hidden_dim))
self.b = nn.Parameter(torch.zeros(hidden_dim))
@jaxtyped(typechecker=beartype)
def forward(self,
x: Float[Tensor, "batch_dim feat_dim"],
h_prev: Union[Float[Tensor, "batch_dim hidden_dim"], None] = None
) -> Float[Tensor, "batch_dim hidden_dim"]:
if h_prev is None:
h = x @ self.w_x + self.b
else:
h = x @ self.w_x + h_prev @ self.w_h + self.b
return F.relu(h)
class RNNDecoder(nn.Module):
def __init__(self, hidden_dim: int, output_dim: int):
super(RNNDecoder, self).__init__()
self.w = nn.Parameter(torch.randn(hidden_dim, output_dim) / np.sqrt(hidden_dim * output_dim))
self.b = nn.Parameter(torch.zeros(output_dim))
@jaxtyped(typechecker=beartype)
def forward(self, h: Float[Tensor, "batch_dim hidden_dim"]) -> Float[Tensor, "batch_dim output_dim"]:
x = h @ self.w + self.b
return x
class RNN(nn.Module):
def __init__(self, feat_dim: int, hidden_dim: int, output_dim: int, sequence_len: int):
super(RNN, self).__init__()
self.encoder = RNNEncoder(feat_dim, hidden_dim)
self.decoder = RNNDecoder(hidden_dim, output_dim)
self.sequence_len = sequence_len
self.hidden_dim = hidden_dim
def forward(self, x: Float[Tensor, "batch_dim sequence_len feat_dim"]) -> Float[Tensor, "batch_dim feat_dim"]:
self.h = None # initial hidden state
# encode
for seq_idx in range(1, self.sequence_len):
self.h = self.encoder(x[:, seq_idx, :], self.h)
# decode
y_hat = self.decoder(self.h)
return y_hat
Checking with dummy data#
tmp_batch_dim = 2
tmp_feat_dim = 3
tmp_output_dim = 7
tmp_hidden_dim = 5
tmp_sequence_len = 10
x = torch.randn(tmp_batch_dim, tmp_sequence_len, tmp_feat_dim)
model = RNN(tmp_feat_dim, tmp_hidden_dim, tmp_output_dim, tmp_sequence_len)
assert model(x).shape == (tmp_batch_dim, tmp_output_dim)
Getting some training data#
Let’s train the model on abstracts of multiple papers.
# import kaggle
# kaggle.api.dataset_download_files("Cornell-University/arxiv", path="data", unzip=True)
import json
with open("data/arxiv-metadata-oai-snapshot.json", "r") as f:
data = []
for i in range(100):
data.append(json.loads(f.readline()))
vocab = set('\n'.join([d["abstract"] for d in data]))
len(vocab)
93
tokenizer = OneHotEncoder(sparse_output=False)
tokenizer.fit(np.array(list(vocab)).reshape(-1, 1))
OneHotEncoder(sparse_output=False)In a Jupyter environment, please rerun this cell to show the HTML representation or trust the notebook.
On GitHub, the HTML representation is unable to render, please try loading this page with nbviewer.org.
OneHotEncoder(sparse_output=False)
tokenizer.transform(np.array(["a", "b", "c"]).reshape(3, 1)).shape
(3, 93)
Create training sequences#
sequence_len = 20
inputs = []
outputs = []
for d in tqdm(data):
abstract = d["abstract"].replace("\n", " ")
for i in range(len(abstract) - sequence_len):
input_seq = abstract[i:i+sequence_len]
output_token = abstract[i+sequence_len]
inputs.append(np.array(list(input_seq)))
outputs.append(np.array(list(output_token)))
inputs = np.stack(inputs)
outputs = np.stack(outputs)
print(inputs.shape, outputs.shape)
inputs = tokenizer.transform(inputs.reshape(-1, 1)).reshape(inputs.shape[0], sequence_len, -1)
outputs = tokenizer.transform(outputs.reshape(-1, 1)).reshape(outputs.shape[0], -1)
print(inputs.shape, outputs.shape)
(78641, 20) (78641, 1)
(78641, 20, 93) (78641, 93)
Train the model#
batch_size = 512
epochs = 100
hidden_dim = 1024
train_inputs = inputs[:int(0.8*len(inputs))]
train_outputs = outputs[:int(0.8*len(outputs))]
test_inputs = inputs[int(0.8*len(inputs)):]
test_outputs = outputs[int(0.8*len(outputs)):]
dataset = TensorDataset(torch.tensor(train_inputs, dtype=torch.float32).to(device), torch.tensor(train_outputs, dtype=torch.float32).to(device))
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
feat_dim = len(vocab)
output_dim = len(vocab)
model = RNN(feat_dim, hidden_dim, output_dim, sequence_len)
# model = torch.compile(model)
model.to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-4)
iter_losses = []
epoch_losses = []
pbar = tqdm(range(epochs))
for epoch in pbar:
loss_accum = 0
for x, y in dataloader:
y_hat = model(x)
loss = F.cross_entropy(y_hat, y.argmax(dim=1))
optimizer.zero_grad()
loss.backward()
optimizer.step()
iter_losses.append(loss.item())
loss_accum += loss.item()
epoch_losses.append(loss_accum / len(dataloader))
pbar.set_postfix({"loss": epoch_losses[-1]})
pbar = tqdm(range(20))
model.train()
for epoch in pbar:
loss_accum = 0
for x, y in dataloader:
y_hat = model(x)
loss = F.cross_entropy(y_hat, y.argmax(dim=1))
optimizer.zero_grad()
loss.backward()
optimizer.step()
iter_losses.append(loss.item())
loss_accum += loss.item()
epoch_losses.append(loss_accum / len(dataloader))
pbar.set_postfix({"loss": epoch_losses[-1]})
Generate text#
def get_char(y_hat):
y_hat_cat = torch.zeros(y_hat.shape)
pred_idx = y_hat.argmax(dim=1)
y_hat_cat[:, pred_idx] = 1
pred_char = tokenizer.inverse_transform(y_hat_cat)
return y_hat_cat, pred_char.item()
def generator(model, input_seq, generated_len):
model.eval()
with torch.no_grad():
gen_chars = []
for i in range(generated_len):
y_hat = model(input_seq)
y_hat_cat, pred_char = get_char(y_hat)
# print(input_seq.shape, y_hat_cat.shape)
input_seq = torch.cat([input_seq[:, 1:, :], y_hat_cat[None, ...].to(device)], dim=1)
one_idx = y_hat.numpy(force=True).argmax()
pred = np.zeros(y_hat.shape)
# print(pred.shape)
pred[:, one_idx] = 1
pred_char = tokenizer.inverse_transform(pred)
gen_chars.append(pred_char.item())
return "".join(gen_chars)
# input
idx = 500
try_input = test_inputs[idx:idx+1]
print("Input:")
print("".join(tokenizer.inverse_transform(try_input[0]).reshape(-1)))
print("\nOutput:")
print(generator(model, torch.tensor(try_input, dtype=torch.float32).to(device), 200))
Input:
right solitons under
Output:
edina in approxistibg inctian strgenslis crmporibnt whew itecharizn pust becala inemantwond the $imile an Paksu foundtion, finitlerans ard dousculaca. The possting of the derev. Thi s)steed s. Te aen
Long Short-Term Memory (LSTM)#
RNNs have vanishing gradient problem. LSTM is a solution to this problem.
Encoder |
Decoder |
|
|---|---|---|
Vanilla NNs |
\(h = f(x)\) |
\(y = g(h)\) |
RNNs |
\(h_t = f(h_{t-1}, x_t)\) |
\(y_t = g(h_t)\) |
For LSTM
Encoder
Decoder $\( y_t = g(h_t) \)$
Coding LSTMs#
class LSTMEncoder(nn.Module):
def __init__(self, feat_dim: int, hidden_dim: int):
super(LSTMEncoder, self).__init__()
def get_weights():
w_x = nn.Parameter(torch.randn(feat_dim, hidden_dim) / np.sqrt(feat_dim * hidden_dim))
w_h = nn.Parameter(torch.randn(hidden_dim, hidden_dim) / np.sqrt(hidden_dim * hidden_dim))
b = nn.Parameter(torch.zeros(hidden_dim))
return w_x, w_h, b
# forget gate
self.w_x_f, self.w_h_f, self.b_f = get_weights()
# input gate
self.w_x_i, self.w_h_i, self.b_i = get_weights()
# output gate
self.w_x_o, self.w_h_o, self.b_o = get_weights()
# cell weights
self.w_x_c, self.w_h_c, self.b_c = get_weights()
@jaxtyped(typechecker=beartype)
def forward(self,
x: Float[Tensor, "batch_dim feat_dim"],
h_prev: Float[Tensor, "batch_dim hidden_dim"] = None,
c_prev: Float[Tensor, "batch_dim hidden_dim"] = None,
) -> Tuple[Float[Tensor, "batch_dim hidden_dim"], Float[Tensor, "batch_dim hidden_dim"]]:
if h_prev is None:
i_t = torch.sigmoid(x @ self.w_x_i + self.b_i) # input multiplier
o_t = torch.sigmoid(x @ self.w_x_o + self.b_o) # output multiplier
c_t = torch.tanh(x @ self.w_x_c + self.b_c) # pre cell state
c_t = i_t * c_t # cell state
h_t = o_t * torch.tanh(c_t) # hidden state
else:
f_t = torch.sigmoid(x @ self.w_x_f + h_prev @ self.w_h_f + self.b_f) # forget gate
i_t = torch.sigmoid(x @ self.w_x_i + h_prev @ self.w_h_i + self.b_i) # input multiplier
o_t = torch.sigmoid(x @ self.w_x_o + h_prev @ self.w_h_o + self.b_o) # output multiplier
c_t = torch.tanh(x @ self.w_x_c + h_prev @ self.w_h_c + self.b_c) # pre cell state
c_t = i_t * c_t + f_t * c_prev # cell state
h_t = o_t * torch.tanh(c_t) # hidden state
return (h_t, c_t)
class LSTM(nn.Module):
def __init__(self, feat_dim: int, hidden_dim: int, output_dim: int, sequence_len: int):
super(LSTM, self).__init__()
self.encoder = LSTMEncoder(feat_dim, hidden_dim)
self.decoder = RNNDecoder(hidden_dim, output_dim)
@jaxtyped(typechecker=beartype)
def forward(self, x: Float[Tensor, "batch_dim sequence_len feat_dim"]) -> Float[Tensor, "batch_dim output_dim"]:
h, c = self.encoder(x[:, 0, :])
for seq_idx in range(1, x.shape[1]):
h, c = self.encoder(x[:, seq_idx, :], h, c)
y_hat = self.decoder(h)
return y_hat
batch_size = 512
epochs = 100
hidden_dim = 1024
model = LSTM(feat_dim, hidden_dim, output_dim, sequence_len)
# model = torch.compile(model)
model.to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
# optimizer = optim.SGD(model.parameters(), lr=1e-3, momentum=0.9)
iter_losses = []
epoch_losses = []
pbar = tqdm(range(epochs))
for epoch in pbar:
loss_accum = 0
for x, y in dataloader:
y_hat = model(x)
loss = F.cross_entropy(y_hat, y.argmax(dim=1))
optimizer.zero_grad()
loss.backward()
optimizer.step()
iter_losses.append(loss.item())
loss_accum += loss.item()
epoch_losses.append(loss_accum / len(dataloader))
pbar.set_postfix({"loss": epoch_losses[-1]})
def get_char(y_hat):
y_hat_cat = torch.zeros(y_hat.shape)
pred_idx = y_hat.argmax(dim=1)
y_hat_cat[:, pred_idx] = 1
pred_char = tokenizer.inverse_transform(y_hat_cat)
return y_hat_cat, pred_char.item()
def generator(model, input_seq, generated_len):
model.eval()
with torch.no_grad():
gen_chars = []
for i in range(generated_len):
y_hat = model(input_seq)
y_hat_cat, pred_char = get_char(y_hat)
# print(input_seq.shape, y_hat_cat.shape)
input_seq = torch.cat([input_seq[:, 1:, :], y_hat_cat[None, ...].to(device)], dim=1)
one_idx = y_hat.numpy(force=True).argmax()
pred = np.zeros(y_hat.shape)
# print(pred.shape)
pred[:, one_idx] = 1
pred_char = tokenizer.inverse_transform(pred)
gen_chars.append(pred_char.item())
return "".join(gen_chars)
# input
idx = 1200
try_input = test_inputs[idx:idx+1]
print("Input:")
input_text = "".join(tokenizer.inverse_transform(try_input[0]).reshape(-1))
print(input_text)
print("\nOutput:")
gen_text = generator(model, torch.tensor(try_input, dtype=torch.float32).to(device), 300)
print(input_text + gen_text)
Input:
ant. Inflationary co
Output:
ant. Inflationary conditions. The resulting soliton solutions can be regarded as a generalization of the method. Finally, the position of the DDA among other methods of light scattering by very large particles, like the ones that are considered in this manuscript. Current limitations and possible ways for improvement a